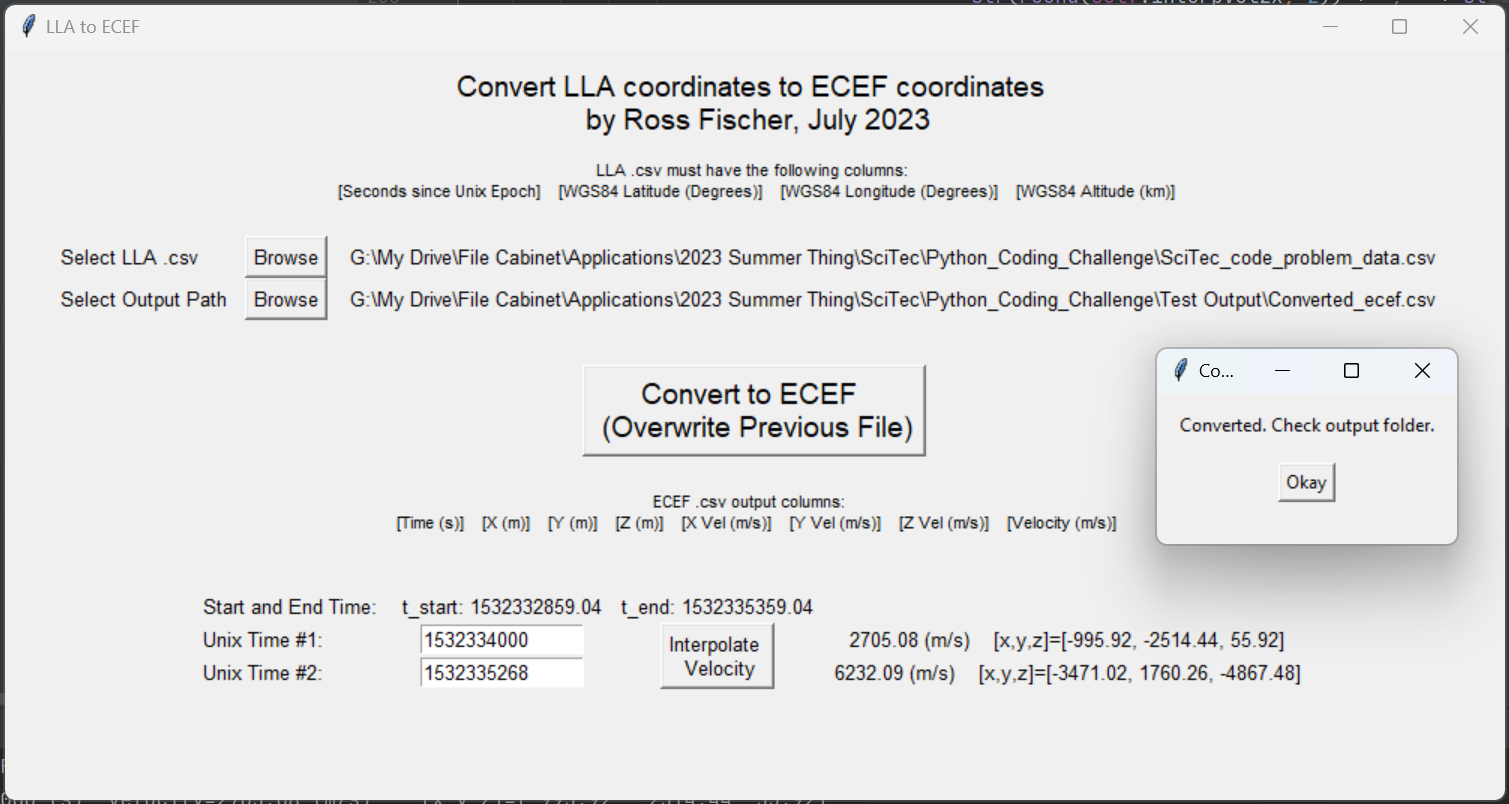
Coding project that converts .csv of LLA coordinates to ECEF coordinates.
Interpolates velocity at given times.
(Expand) Read Me
```
Ross Fischer
LLAtoECEF Project
2023/07
Virtualenv, Python 3.11
- To Run:
- With terminal: python LLAtoECEF.py
- Within IDE, run script
- .csv to be clean and without nans
Purpose & Reqs:
- Convert LLA coordinates to ECEf coordinates
- Ability to interpolate velocity vectors at entered/given times. (start w/: t = 1532334000 and 1532335268)
Assumptions:
- LLA data is provided as csv, csv is acceptable as output.
- Desired output data: time, x, y, z, velocity vector, velocity magnitude
- Interpolate then print velocity vector to sys.stdout for given times
Libraries:
- os, sys, tkinter
- numpy 1.25
- pandas 2.03
Resources:
- "Datum Transformations of GPS Positions", by u-blox ag (www.u-blox.ch), July 5th, 1999
- docs.python.org, numpy.org, w3schools.com
- github & stackoverflow communities
```
(Expand) Code
```
import os
import sys
import tkinter as tk
from tkinter import filedialog
import numpy as np
import pandas as pd
class Gui:
def __init__(self):
self.ecefpath = None # initialize instance variables to avoid Unresolved Attribute Reference
self.lla = None
self.lladf = pd.DataFrame()
self.ecefdf = pd.DataFrame()
self.root = tk.Tk() # setup GUI interface/buttons/labels/etc
self.root.geometry("1000x500")
self.root.title("LLA to ECEF")
self.description = tk.Label(self.root,
text="Convert LLA coordinates to ECEF coordinates \n by Ross Fischer, July 2023",
font=('Arial', 14))
self.description.pack(padx=20, pady=10)
self.llaformat = tk.Label(self.root, font=('Arial', 8),
text="LLA .csv must have the following columns: \n [Seconds since Unix Epoch]"
" [WGS84 Latitude (Degrees)]"
" [WGS84 Longitude (Degrees)]"
" [WGS84 Altitude (km)]")
self.llaformat.pack(padx=5)
self.frame1 = tk.Frame(self.root) # setup frame for import/export grid
self.frame1.columnconfigure(0, weight=1)
self.frame1.columnconfigure(1, weight=1)
self.frame1.columnconfigure(2, weight=3)
self.frame1.pack(pady=20, ipadx=15)
self.lbllla = tk.Label(self.frame1, text="Select LLA .csv", font=('Arial', 10))
self.lbllla.grid(column=0, row=0, sticky=tk.W)
self.lblecef = tk.Label(self.frame1, text="Select Output Path", font=('Arial', 10))
self.lblecef.grid(column=0, row=1, sticky=tk.W)
self.defaultpathtext = "Select File or Path"
self.lblllapath = tk.Label(self.frame1, text=self.defaultpathtext, font=('Arial', 10))
self.lblllapath.grid(column=2, row=0)
self.lblecefpath = tk.Label(self.frame1, text=self.defaultpathtext, font=('Arial', 10))
self.lblecefpath.grid(column=2, row=1)
self.btnlla = tk.Button(self.frame1, text="Browse", font=('Arial', 10), command=lambda: self.llabutton())
self.btnlla.grid(column=1, row=0)
self.btnecef = tk.Button(self.frame1, text="Browse", font=('Arial', 10), command=lambda: self.ecefbutton())
self.btnecef.grid(column=1, row=1)
self.btnconvert = tk.Button(self.root, text="Convert to ECEF \n (Overwrite Previous File)", font=('Arial', 14),
command=lambda: self.convertbutton())
self.btnconvert.pack(pady=10)
self.llaformat = tk.Label(self.root, font=('Arial', 8),
text="ECEF .csv output columns: \n [Time (s)]"
" [X (m)]"
" [Y (m)]"
" [Z (m)]"
" [X Vel (m/s)]"
" [Y Vel (m/s)]"
" [Z Vel (m/s)]"
" [Velocity (m/s)]")
self.llaformat.pack(padx=5, pady=10)
# setup frame for interpretation grid
self.frame2 = tk.Frame(self.root)
self.frame2.columnconfigure(0, weight=1)
self.frame2.columnconfigure(1, weight=1)
self.frame2.columnconfigure(2, weight=1)
self.frame2.columnconfigure(3, weight=1)
self.frame2.pack(pady=25, ipadx=15)
# initialize Instance variables
self.interptime1 = 1532334000
self.interptime2 = 1532335268
self.interpvel1 = None
self.interpvel1x = None
self.interpvel1y = None
self.interpvel1z = None
self.interpvel2 = None
self.interpvel2x = None
self.interpvel2y = None
self.interpvel2z = None
# labels, entrys, and button for interpolation
# Row 0
self.lbltime = tk.Label(self.frame2, text="Start and End Time:", font=('Arial', 10))
self.lbltime.grid(column=0, row=0, sticky=tk.W)
self.lbltimestart = tk.Label(self.frame2, text="t_start: (must first convert)", font=('Arial', 10))
self.lbltimestart.grid(column=1, row=0)
self.lbltimeend = tk.Label(self.frame2, text="t_end: (must first convert)", font=('Arial', 10))
self.lbltimeend.grid(column=2, row=0)
# row 1
self.lblinterp1 = tk.Label(self.frame2, text="Unix Time #1:", font=('Arial', 10))
self.lblinterp1.grid(column=0, row=1, sticky=tk.W)
self.txtinterp1 = tk.Entry(self.frame2, width=15, font=('Arial', 10))
self.txtinterp1.insert(tk.INSERT, str(self.interptime1))
self.txtinterp1.grid(column=1, row=1)
self.lblinterpvel1 = tk.Label(self.frame2, text="(must first convert)", font=('Arial', 10))
self.lblinterpvel1.grid(column=3, row=1)
# row 2
self.lblinterp2 = tk.Label(self.frame2, text="Unix Time #2:", font=('Arial', 10))
self.lblinterp2.grid(column=0, row=2, sticky=tk.W)
self.txtinterp2 = tk.Entry(self.frame2, width=15, font=('Arial', 10))
self.txtinterp2.insert(tk.INSERT, str(self.interptime2))
self.txtinterp2.grid(column=1, row=2)
self.lblinterpvel2 = tk.Label(self.frame2, text="(must first convert)", font=('Arial', 10))
self.lblinterpvel2.grid(column=3, row=2)
# button
self.btninterp = tk.Button(self.frame2, text="Interpolate \n Velocity", font=('Arial', 10),
command=lambda: self.interpbutton())
self.btninterp.grid(column=2, row=1, rowspan=2)
def llabutton(self): # button function to choose LLA .csv
self.lla = filedialog.askopenfile(mode='r', filetypes=[('CSV Files', '*.csv')])
if self.lla:
self.lblllapath = tk.Label(self.frame1, text=str(os.path.abspath(self.lla.name)), font=('Arial', 10))
self.lblllapath.grid(column=2, row=0)
def ecefbutton(self): # button function to choose ECEF output location
self.ecefpath = filedialog.askdirectory() + '/Converted_ecef.csv'
self.ecefpath = self.ecefpath.replace("/", chr(92))
if self.ecefpath:
self.lblecefpath.config(text=str(self.ecefpath), font=('Arial', 10))
def convertbutton(self): # button function to convert LLA to ECEF
if self.lla and self.ecefpath:
self.lladf = pd.read_csv(os.path.abspath(self.lla.name), header=None) # read LLA .csv into df
self.lladf.columns = ['time', 'lat', 'lon', 'alt'] # assign column names
rada = float(6378137) # semi-major axis (meters)
f = 1 / 298.257223563 # ellipsoid flattening factor
radb = rada * (1 - f) # semi-minor axis (meters)
ecc = np.sqrt((rada ** 2 - radb ** 2) / (rada ** 2)) # first eccentricity
# ecc2 = np.sqrt((rada**2 - radb**2)/(radb**2)) # second eccentricity. Unused
n = rada / (np.sqrt(1 - (ecc ** 2 * np.sin(np.radians(self.lladf['lat'])) ** 2))) # radius of curve (m)
ecefx = np.array((n + self.lladf['alt'] * 1000) * np.cos(np.radians(self.lladf['lat'])) *
np.cos(np.radians(self.lladf['lon']))) # x-coord
ecefy = np.array((n + self.lladf['alt'] * 1000) * np.cos(np.radians(self.lladf['lat'])) *
np.sin(np.radians(self.lladf['lon']))) # y-coord
ecefz = np.array(((n * (radb ** 2) / (rada ** 2)) + self.lladf['alt'] * 1000) *
np.sin(np.radians(self.lladf['lat']))) # z-coord
timediff = np.concatenate((np.array([0]), np.diff(self.lladf['time'])))
ecefxdiff = np.concatenate((np.array([0]), np.diff(ecefx))) # variable differences for vel calc
ecefydiff = np.concatenate((np.array([0]), np.diff(ecefy)))
ecefzdiff = np.concatenate((np.array([0]), np.diff(ecefz)))
ecefposdiff = np.array(np.sqrt(ecefxdiff ** 2 + ecefydiff ** 2 + ecefzdiff ** 2))
ecefxvel = np.concatenate(((np.array([0])), np.array(ecefxdiff[1:] / timediff[1:])))
ecefyvel = np.concatenate(((np.array([0])), np.array(ecefydiff[1:] / timediff[1:])))
ecefzvel = np.concatenate(((np.array([0])), np.array(ecefzdiff[1:] / timediff[1:])))
ecefvel = np.concatenate(((np.array([0])), np.array(ecefposdiff[1:] / timediff[1:])))
self.ecefdf = pd.DataFrame({'time': self.lladf['time'],
'x': ecefx,
'y': ecefy,
'z': ecefz,
'xvel': ecefxvel,
'yvel': ecefyvel,
'zvel': ecefzvel,
'vel': ecefvel}) # construct Dataframe
self.ecefdf.to_csv(self.ecefpath, index=False, header=False)
self.lbltimestart.config(text="t_start: " + str(self.lladf['time'].iat[0])) # find start and end time
self.lbltimeend.config(text="t_end: " + str(self.lladf['time'].iat[-1]))
self.interpbutton()
popup = tk.Tk() # pop-up confirming conversion
popup.geometry("200x100")
popup.wm_title("Complete")
popuptxt = tk.Label(popup, text="Converted. Check output folder.")
popuptxt.pack(side='top', pady=10)
btnpopup = tk.Button(popup, text="Okay", command=popup.destroy)
btnpopup.pack(pady=5)
def interpbutton(self): # button function to interpolate velocity at entered times in GUI
if not self.ecefdf.empty:
self.interptime1 = float(self.txtinterp1.get())
self.interptime2 = float(self.txtinterp2.get())
if self.interptime1 < self.lladf['time'].iat[0] or self.interptime1 > self.lladf['time'].iat[-1]:
self.lblinterpvel1.config(text="Entered Time Out of Range")
sys.stdout.write("Entered Time Out of Range")
else:
self.interpvel1 = np.interp(self.interptime1, self.ecefdf['time'], self.ecefdf['vel'])
self.interpvel1x = np.interp(self.interptime1, self.ecefdf['time'], self.ecefdf['xvel'])
self.interpvel1y = np.interp(self.interptime1, self.ecefdf['time'], self.ecefdf['yvel'])
self.interpvel1z = np.interp(self.interptime1, self.ecefdf['time'], self.ecefdf['zvel'])
self.lblinterpvel1.config(text=str(round(self.interpvel1, 2)) + ' (m/s) [x,y,z]=[' +
str(round(self.interpvel1x, 2)) + ', ' + str(round(self.interpvel1y, 2))
+ ', ' + str(round(self.interpvel1z, 2)) + ']')
sys.stdout.write("At t=" + self.txtinterp1.get() + " (s), velocity=" +
self.lblinterpvel1.cget("text") + '\n')
if self.interptime2 < self.lladf['time'].iat[0] or self.interptime2 > self.lladf['time'].iat[-1]:
self.lblinterpvel2.config(text="Entered Time Out of Range")
sys.stdout.write("Entered Time Out of Range")
else:
self.interpvel2 = np.interp(self.interptime2, self.ecefdf['time'], self.ecefdf['vel'])
self.interpvel2x = np.interp(self.interptime2, self.ecefdf['time'], self.ecefdf['xvel'])
self.interpvel2y = np.interp(self.interptime2, self.ecefdf['time'], self.ecefdf['yvel'])
self.interpvel2z = np.interp(self.interptime2, self.ecefdf['time'], self.ecefdf['zvel'])
self.lblinterpvel2.config(text=str(round(self.interpvel2, 2)) + ' (m/s) [x,y,z]=[' +
str(round(self.interpvel2x, 2)) + ', ' + str(round(self.interpvel2y, 2))
+ ', ' + str(round(self.interpvel2z, 2)) + ']')
sys.stdout.write("At t=" + self.txtinterp2.get() + " (s), velocity=" +
self.lblinterpvel2.cget("text") + '\n\n')
if __name__ == "__main__":
# comment block in case class arguments are desired
# parser = argparse.ArgumentParser()
# args = parser.parse_args()
# gui = Gui(args)
# gui.root.mainloop()
gui = Gui()
gui.root.mainloop()
```